DR. JAN HADENFELD
| Next: Ausblick Up: Glätten von Flächen Previous: Beispiele
Glatte Approximation mit B-Spline-FlächenBei der Erzeugung von parametrisierten Flächen aus Meßpunkten werden üblicherweise in einem ersten Schritt die Punkte parametrisiert; dann wird ein least squares fit durchgeführt. Diese Vorgehensweise hat zwei Nachteile. Es werden nicht die kürzesten Abstände der Punkte zur Fläche minimiert, sondern durch die Parametrisierung induzierte Abstände. Die zwangsläufig nicht optimale Parameterbelegung führt oft auf ein schlecht konditioniertes System beim least squares fit. Die Folge sind unbefriedigende, wellige Flächen. Das vorgestellte Verfahren bestimmt eine optimale Parametrisierung zusammen mit der Fläche in einem iterativen Prozeß. Beim einfachen least squares fit müssen außerdem die Schoenberg-Whitney-Bedingungen erfüllt werden. Dadurch können keine beliebig berandeten Punktmengen oder Punktmengen mit ,,Löchern`` behandelt werden. Durch die Einführung von Energiefunktionalen wird es möglich, auch solche Punktmengen glatt zu approximieren [14,17]. Die Randkurven der Tensorproduktfläche fallen dann nicht mehr mit den Rändern der Punktwolke zusammen. In einem zweiten Schritt wird die berechnete Approximationsfläche an den Rändern der Punktwolke abgeschnitten (siehe Figur (5)). Diese neuen Randkurven werden auch als Trimmkurven bezeichnet und über Splinekurven im Parameterbereich der Fläche beschrieben. Seien nun die fehlerbehafteten Meßpunkte mit
Der Abstand der gesuchten Fläche zu den Vorgabepunkten wird über
erfaßt. Damit läßt sich das Approximationsproblem schreiben als:
Fest vorgegeben sind die Ordnungen
Als Unbekannte hat man die Kontrollpunkte
führt auf ein hochdimensionales, nichtlineares Problem, dessen Lösung mit Standardmethoden zu sehr hohen Rechenzeiten führt. Durch das Festhalten der Kontrollpunkte bzw. der Punktparameterwerte zerfällt das Problem in zwei einfache Teile [5]:
Damit kann die Flächenapproximation als Iterationsverfahren formuliert werden:
Die Startparametrisierung kann durch Projektion der Punkte auf einfache Referenzflächen erfolgen [11]. Die Güte der Parameterwerte spielt hier eine untergeordnete Rolle, da diese Parameterwerte nur eine erste Näherung darstellen. Eine Projektion auf die Ausgleichsebene ist in vielen Fällen ausreichend. Mit
Die notwendigen und hinreichenden Bedingungen für ein Minimum
führen auf das lineare Gleichungssystem
Die quadratischen Matrizen
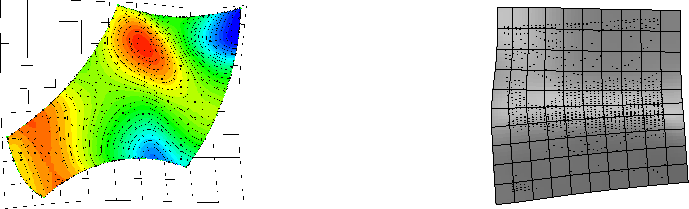
 mit den Abkürzungen (9) des Abschnitts 3.3, wobei der Integrationsbereich jedoch nicht eingeschränkt wird. Die Matrizen Die Parameterkorrektur in Schritt 3 bestimmt für jeden Punkt die Parameterwerte des Lotfußpunktes auf der Fläche. Die Minimierung wird mit einem 2-dimensionalen Newton-Verfahren durchgeführt. Die Korrekturterme lauten und sind unabhängig von den verwendeten Energieintegralen. Das Gesamtverfahren erzeugt anfangs sehr glatte, steife Flächen, die sich in jedem Iterationsschritt besser an die Vorgabepunkte anpassen. Dadurch bleibt die Parameterkorrektur nicht vorzeitig in lokalen Minima hängen; die orthogonale Lage der Fehlervektoren kann im allgemeinen bereits nach ein bis zwei Newton-Schritten erreicht werden. Im Anschluß sind noch einige Beispielflächen teilweise zusammen mit Isophoten dargestellt. In Figur 4 ist ein least squares fit zu sehen und die korrespondierende Fläche, die mit dem vorgestellten Verfahren berechnet wurde. Figur 5 zeigt eine glatte Approximationsfläche zu einer fünfeckig berandeten Punktmenge und eine Approximationsfläche zu einer irregulären Punktmenge mit großen Löchern. Figur 6 schließlich zeigt den least squares fit und die glatte Approximation zu einer komplex strukturierten Punktmenge.
|